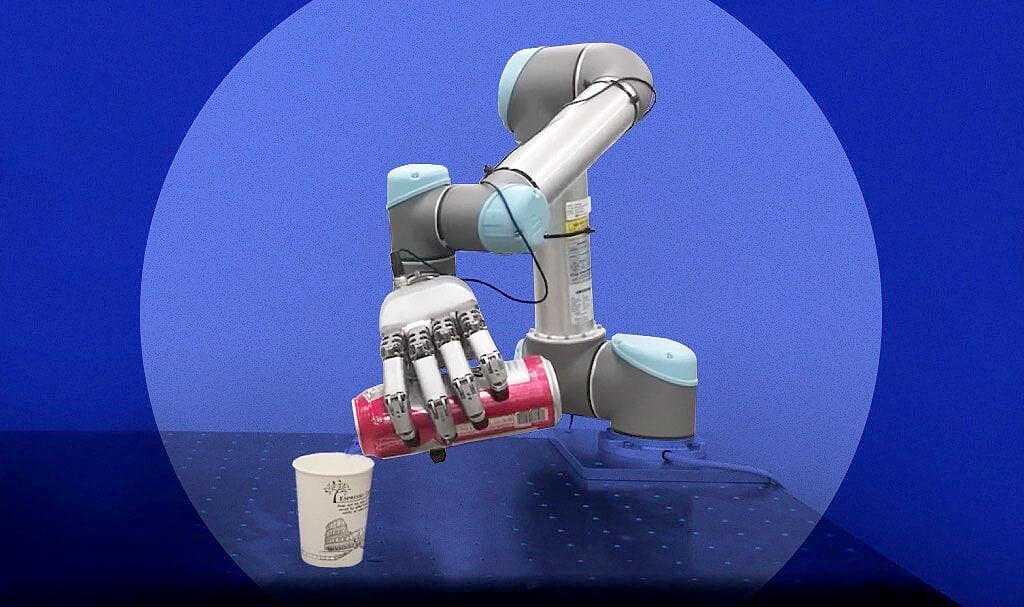
卵をつかみ、缶を押しつぶすことも...人間の手に匹敵するロボットハンド 韓国で開発
韓国の科学者らは、触覚を持ち、正確に把持し、道具の操作が可能な非常に器用なロボットハンドを構築した。
AsianScientist - 手一杯な場合でもロボット工学分野の新しい発明が手を貸してくれる。その手は物体をしっかり持ったり、はさみを使用したりするなど、人間レベルの機能を実行してくれる。韓国の科学者チームは、Nature Communications 誌でその技術を詳しく説明した。
人間の手は、微妙な触り具合から強い握力まで、触覚、複雑な筋肉組織、そして全身体の骨の4分の1を使った複雑な組み合わせにより、さまざまな機能を行使することができる。
科学者らはこれらの能力を模倣して、インテリジェントロボットを構築し、義肢その他の産業用アプリケーションの新しいソリューションとしようと考えている。しかしながら、人間の正確な手の動きを模倣するためには、通常は部品を追加する必要があるため、設計が複雑になり、ロボットアームなどといった他の部分との統合が困難になる。
そこで、韓国・亜洲大学校のキム・ウイキュム (Kim Uikyum) 博士らは、外付け部品の必要性をなくすために連結型方法を採用し、非常に器用な関節の動きを備えたロボットハンドを作成した。この構造は手のひら自体の中に小さなモーターをいくつか取り付けたものであり、さまざまなレベルのパワーを提供し、傾斜、屈曲、折りたたみなどの動きを可能にした。
この柔軟性のおかげで、ロボットハンドは、卵のように壊れやすい物体をつかむことも、ソーダ缶を押しつぶすのに十分な力を発揮することもできる。ロボットは色々な大きさと形のアイテムをつかむことができ、その機能的な把持能力はテニスボールや鉛筆をつかむために使用される3本のグリップと、小さな塩の粒やおもちゃのレンガをつかむ2本のつまみを採用することで成り立っている。
このロボットハンドは人間の手に匹敵するスキルを備え、ピンセットなどのさまざまな道具を使用してマイクロチップをつまみ上げ、目的の方向に回転させ回路基板に挿入することも可能である。また、18キログラムのダンベルを持ち上げたり、強度を保ちつつセンサーを30分間押したりするのに十分な耐久性を見せた。
さらに、この手は市販のロボットアームに簡単に取り付けることができるので、コストや製造工程の複雑性をあまり変えることなく、さらに発展させることができる。
科学者らは、最先端のエンジニアリングと市場の考慮事項を組み合わせることにより、手術支援から製造工程の自動化まで、ロボットハンドの適用を拡大できる設計を構想している。
「主な利点は、ハンドが高性能であり、部品構成がハンドそのものと統合されていることです。将来的には、これまでにないタスクを実行することで、新しい研究分野を開拓することでしょう」と著者らは期待している。