歩行ロボット、暗闇でも不整地を歩行可能に—韓国、「DreamWaQ」開発
韓国科学技術院(KAIST)のミョン・ヒョン(Myung Hyun)教授が率いる研究チームは、4足歩行ロボットが、センサーで収集した視覚・触覚情報に頼らずに段差や不整地を移動することを可能にする、深層強化学習を用いたロボット制御技術を開発した。5月18日付け発表。
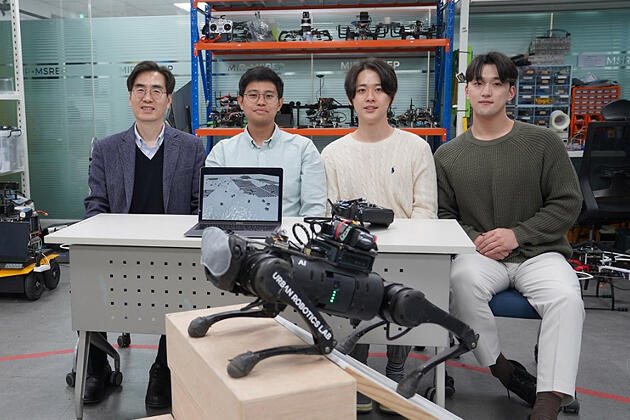
ミョン・ヒョン教授(左)ら研究チーム
運動学・動力モデルに基づく既存のロボット制御装置は、野原や不整地等の非定型的な環境を歩行する際、認知能力(cognitive ability)を用いて周囲の環境の情報を収集する必要がある。
これに対し、今回開発された制御装置は、シミュレーターから取得したさまざまな環境に関するデータを用いて、歩行ロボットの各モーターに対する適切な制御コマンドをすばやく計算する。この技術は、人間が夜中に起きてトイレに行くときのように、ロボットが暗闇の中でも動けるようにするという意味で「DreamWaQ(ドリームウォーク)」と名付けられた。
この技術を搭載したロボットは、木の根や小石の多い野原を含む屋外環境を安定して歩行し、体高の3分の2ほどの段差がある階段を乗り越えられることも示した。この技術は、暗闇や煙により視覚的な確認が困難な災害現場等でのロボットの利用に役立つ可能性がある。研究チームはこの研究成果を、「米国電気電子学会(IEEE)ロボット工学ロボティクスとオートメーションに関する国際会議(ICRA)」で発表。
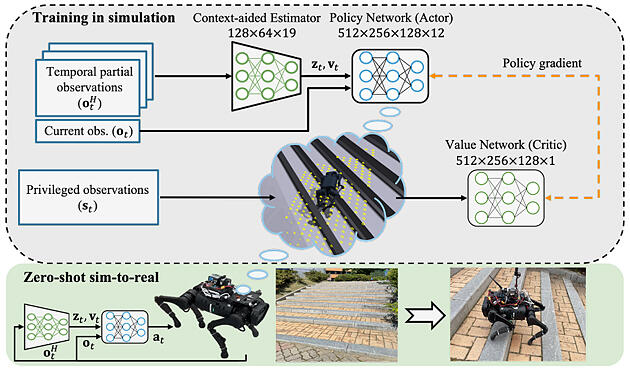
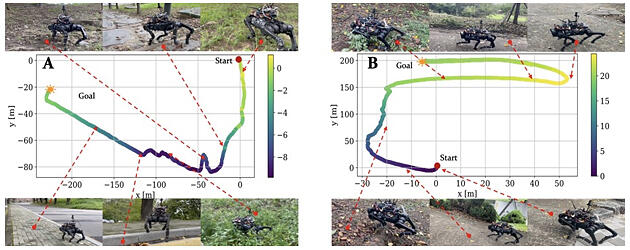
研究チームが開発した「DreamWaQ(ドリームウォーク)」の概要
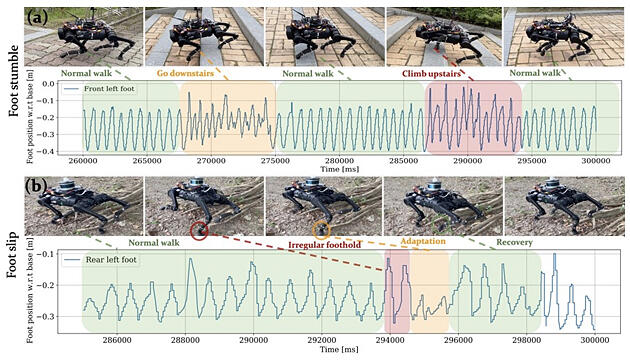
ロボットの足が地表に触れると地面情報を推定し、急速に変化する地面の状況に迅速に適応することができる
小型歩行ロボットでも高低差約20cmの段差を乗り越えることができる
(出典:いずれもKAIST)
サイエンスポータルアジアパシフィック編集部