汗に強いウエアラブル・ロボットセンサーを開発 韓国KAIST
韓国科学技術院(KAIST)の研究チームが、汗や角質などの皮膚表面の状態などに影響されることなく生理信号を高精度で電気的に検知できる伸縮性と粘着性のあるマイクロニードルセンサーを開発した。1月30日付発表。この研究成果は、Science Advancesに掲載された。
リハビリ治療でウエアラブル・ロボットに人間の動作の意図を正確に認識させるには、正確な筋電(Electromyography: EMG)測定が可能なウエアラブル型の電気生理学センサーが必要となる。しかし、既存のセンサーは時間の経過とともに信号品質が劣化することが多く、また、着用者の皮膚の状態に大きく影響される。さらに、センサーの機械的高度が高いと、接触面が皮膚の動きについていけず、ノイズが発生する。
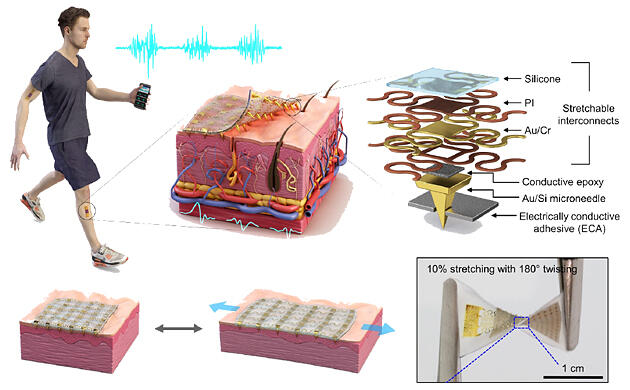
伸縮性マイクロニードル接着パッチ (SNAP) の設計と動作コンセプト
(A) システム全体の構成と SNAP の適用を示す概略図
(B) SNAPの分解図。伸縮可能な蛇行相互接続、AuコーティングされたSiマイクロニードル、およびAgフレークとシリコンの複合材料で作られたECAで構成される
(C) SNAPの高い機械的コンプライアンスを示す光学画像
こうした課題を克服するため、KAISTの電気工学部(School of Electrical Engineering)のジョン・ジェウォン(Jung Jae-Woong)教授と機械工学科(Department of Mechanical Engineering)のキム・ジョン(Kim Jung)教授率いる共同研究チームは、マイクロニードルを柔らかいシリコンポリマー基板に組み込むことで、伸縮性と粘着性のあるマイクロニードルセンサーを作り上げた。
硬いマイクロニードルは、電気抵抗の高い角質層を貫通するため、皮膚との接触抵抗を効果的に下げることができ、皮膚表面の汚れに関係なく高品質の電気生理学的信号を得られる。また、柔らかく粘着性のある導電性基板は、皮膚の伸縮に対応するため装着感が向上し、動きに起因するノイズを最小限に抑えられる。
ジョン教授は、「開発したマイクロニードルセンサーによってウエアラブル・ロボットをより高い精度と安定性で制御できるようになり、ロボットを使う患者のリハビリに役立つだろう」と述べた。
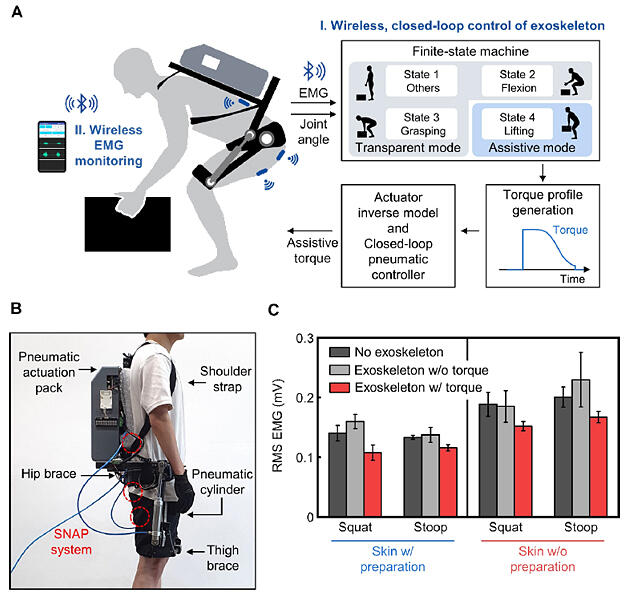
外骨格ロボットの閉ループ制御用のヒューマン マシン インターフェイス (HMI) としてのワイヤレス伸縮性マイクロニードル接着パッチ (SNAP) システムのデモンストレーション
(A) 外骨格ロボットのシステム アーキテクチャと制御戦略を描いた図
(B) 空気圧バックサポート外骨格システムのハードウェア構成
(C) 前処理された皮膚と前処理されていない皮膚のロボット支援を使用した場合と使用しない場合の筋電図検査 (EMG) の二乗平均平方根 (RMS) の比較
(出典:いずれもKAIST)
サイエンスポータルアジアパシフィック編集部