多目的垂直離着陸ホバーバイクの中核技術を開発 韓国KAIST
韓国科学技術院(KAIST)は、航空宇宙工学科(Department of Aerospace Engineering)のパン・ヒョチョン(Bang Hyochoong)教授らの研究チームが、有人車両と無人車両の両方で運用できる多目的垂直離着陸ホバーバイクの中核技術の開発に成功したと発表した。この技術は、2025年2月26日~28日に釜山BEXCOで開催されるドローンショーで初公開される予定である。
研究チームのメンバー
開発されたホバーバイク・プラットフォームは、バッテリーベースのドローンの欠点を克服するため、ガソリンエンジンベースのハイブリッドシステムを導入し、海外の技術水準と比較して約60%の性能向上と最大積載重量を達成した。これにより、民生用途では緊急物資の輸送や物流、救助活動、軍事用途では軍事輸送・任務支援など、さまざまな分野での活用が期待される。
搭載するナビゲーションシステムには、ディファレンシャルGPS(DGPS)と慣性航法システム(INS)を組み合わせたDGPS/INSをベースとしたマルチセンサーフュージョン技術を応用し、GPSのない環境や電波の弱い環境でも信頼性の高い精密ナビゲーション技術を利用して安定した飛行を確保できるようにした。また、外的要因に関わりなく確実な操縦を可能にする高信頼性飛行制御技術と故障検出技術も開発した。
パン教授は、「高信頼性飛行制御と精密ナビゲーション技術により、さまざまな環境下でのホバーバイクの高い実用性を証明した」と研究の意義を強調した。
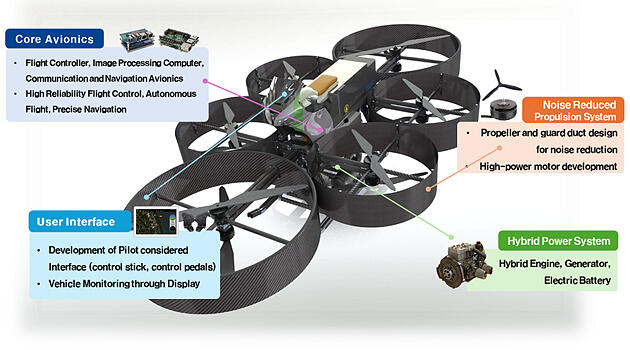
図1.高信頼性多目的ホバーバイクの主な特徴
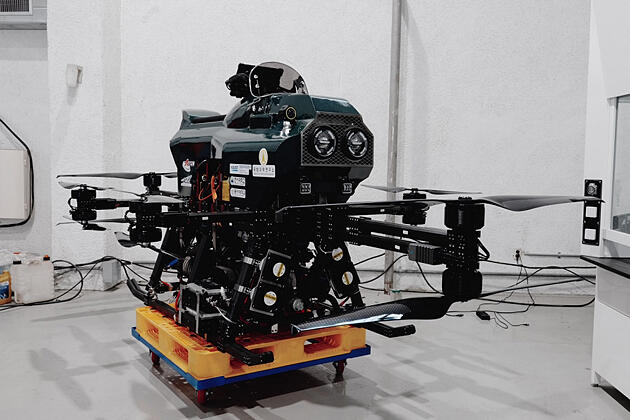
図2. ホバーバイクのプロトタイプモデル
(出典:いずれもKAIST)
(2024年12月27日付発表)
サイエンスポータルアジアパシフィック編集部