金属の壁や天井を高速で登る4足歩行ロボット「MARVEL」開発 韓国
韓国科学技術院(KAIST)の研究チームは、鋼の壁や天井を高速で移動できる4足歩行ロボット「マーベル(Magnetically Adhesive Robot for Versatile and Expeditious Locomotion:MARVEL)」を開発した。
歩行して壁を登るロボットは、車輪や無限軌道を使用するロボットよりも障害物のある表面での移動性に優れているが、移動速度が遅いという欠点があった。
今回、機械工学科(Department of Mechanical Engineering)のパク・ヘウォン(Park Hae-Won)教授が率いる研究チームは、永電磁石(Electro-Permanent Magnet:EPM)と磁気レオロジーエラストマー(Magneto-Rheological Elastomer:MRE)を用いて、磁石の吸着力の切り替えが容易で、不均一な表面でも高い吸着力を維持できるロボットの足用パッドを開発した。
このパッドを装着したマーベルは、垂直な壁を70cm/秒という高速で歩いて移動し、天井も最大50cm/秒で歩くことができる。これは歩行して壁を登るロボットとしては世界最速である。このロボットは、船舶、橋、送電塔等の大型構造物や建設現場で保守点検や修理に幅広く活躍し、安全性と生産性を向上できると期待されている。
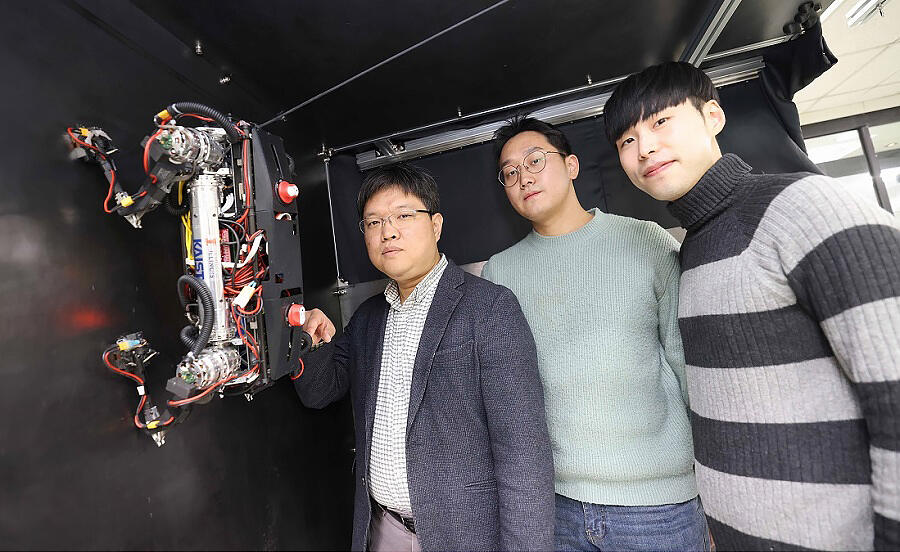
パク・ヘウォン(Park Hae-Won)教授(左)ら
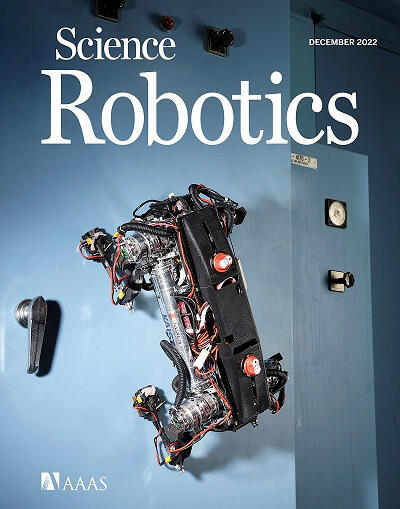
学術誌 Science Robotics の表紙を飾った

さまざまな鉄の表面を歩く4足歩行ロボット「マーベル」。(A) 垂直壁 (B) 天井(C) 垂直な壁の障害物を乗り越える (D) 床から壁へ、壁から天井への移行を行う (E) 貯蔵タンクの上を移動する (F) 2kg のウエートを付けて壁を登り(左)、3kgのウエートを付け天井の上を歩く(右)

磁気足の説明 (A) 磁石ソールのコンポーネント: 足首、正方形の永電磁石(S-EPM)、磁気レオロジーエラストマー(MRE)足用パッド。(B) S-EPM および MRE足用パッドのコンポーネント。(C) S-EPM の動作原理。左図のように着磁方向を揃えると、キーパーから磁束が出て鉄板を循環し、保持力が発生します(ON状態)。逆に、右図のように磁化方向を揃えると、S-EPM内部で磁束が循環し、保持力がなくなる(OFF状態)
(提供:いずれもKAIST)
2022年12月26日付け発表。研究成果は学術誌 Science Robotics の2022年12月号に掲載され、表紙論文に選ばれた。
サイエンスポータルアジアパシフィック編集部