犬型ロボット「RaiBo」、砂浜を走らせることに成功 韓国KAIST
韓国科学技術院(KAIST)は1月25日、同院の研究チームが、砂浜のような変形しやすい地面を4足歩行ロボットが安定して歩行できるようにする制御技術を開発したと発表した。研究成果は学術誌 Science Robotics に掲載された。

歩行ロボットの分野では、多様な地面での歩行を制御するため、強化学習手法に基づき、シミュレーションで収集したデータを用いて学習した制御装置(controller)が使用されてきた。しかし、このような学習に基づく制御装置は、実環境とシミュレーション環境に相違がある場合に急速に性能が低下するため、データ収集段階で、実環境とよく似たシミュレーション環境を使用することが重要になる。
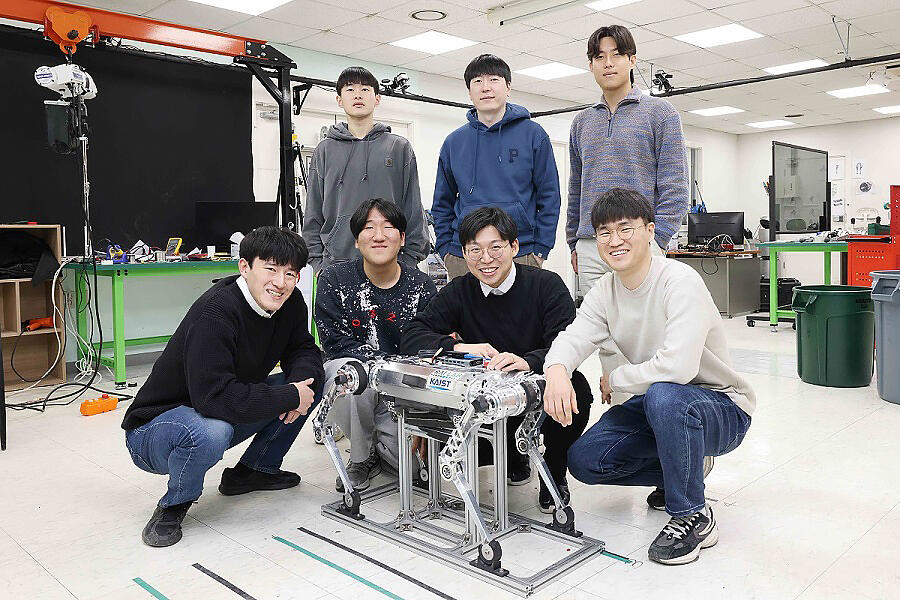
研究チームのメンバーら
(提供:いずれもKAIST)
今回、研究チームは、砂のような粒状体で構成される地面との接触により歩行ロボットが受け取る力をモデル化し、変形する地面を効率的にシミュレーションすることに成功した。さらに、歩行しながらさまざまな地面に適応するためのリアルタイムな意思決定に適した人工ニューラルネットワーク構造を強化学習に適用した。
KAISTで開発された犬型ロボット「RaiBo」にこの技術を用いた制御装置を搭載したところ、足が完全に砂の中に埋もれていたにもかかわらず、砂浜を最大3.03メートル/秒で歩行した。さらに、草原や陸上競技用トラック等のより硬い地面でも、制御アルゴリズムに変更を加えることなく地面の特性に適応し、安定して歩行した。
筆頭著者である機械工学科(Department of Mechanical Engineering)の博士課程学生チョ・スヨン(Choi Suyoung)氏は「変形する地面への適用には、実際の地面に近い接触体験により学習した制御装置を用いることが不可欠だとわかった。この制御装置はロボット歩行に関するさまざまな研究に応用できる」と語った。
サイエンスポータルアジアパシフィック編集部