不連続地形でも高速移動が可能、四足歩行ロボットRAIBOを開発 韓国KAIST
韓国科学技術院(KAIST)は6月4日、同院の研究チームが階段や瓦礫、垂直の壁、段差などの不連続かつ複雑な地形においても、時速14.4km(秒速4m)での高速移動が可能な四足歩行ロボットRAIBOを開発したことを発表した。研究成果は学術誌Science Roboticsに掲載された。

研究チームメンバーの集合写真(ジェミン・ファンボ教授は前列右から2人目)
KAIST機械工学科のジェミン・ファンボ(Jemin Hwangbo)教授率いる研究チームが開発したRAIBOは、1.3mの溝を飛び越え、30°の傾斜や飛び石を含む複合地形を軽快に走破することができ、今後は災害現場での捜索や山岳地での探索任務などへの実用化が期待されている。
本研究は、ロボットの安定した高速移動を実現するために、足場の位置を計画するプランナーの開発とその位置に正確に足を運ぶトラッカーの開発をするという2段階のアプローチで進められた。プランナーはニューラルネットワークを活用したヒューリスティックとシミュレーションを通じて、物理的に実現可能な経路を素早く検索、検証する。トラッカーは強化学習を通じて計画された区画を正確に踏むようにトレーニングされた。このプロセス中ではマップジェネレーターと呼ぶ生成モデルがターゲットの分布を提供している。
既存手法では、足場位置に加え、接触タイミングやロボットの姿勢などさまざまな要素を考慮していたが、本研究では足場位置のみを探索空間とすることで計算量を大幅に削減した。また、猫の歩行方法に着想を得て、後ろ足が前足と同じ場所を踏む構造にすることでさらなる計算量削減に成功している。
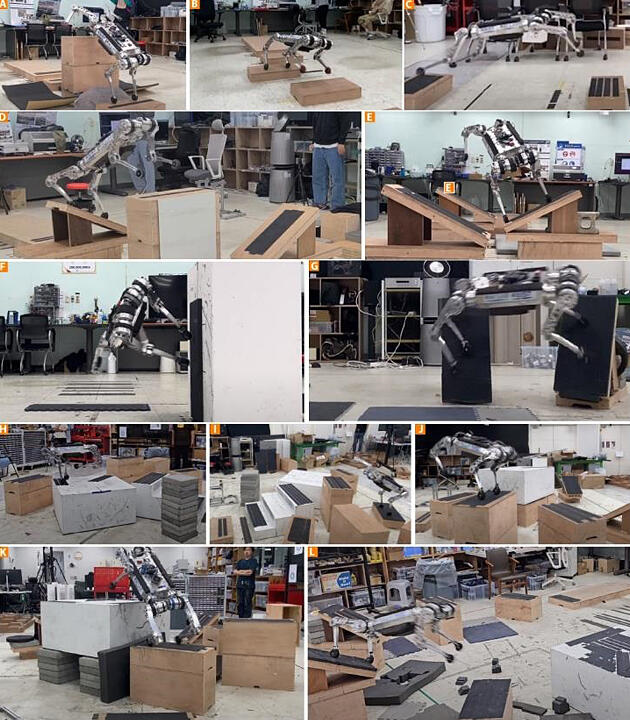
さまざまな不連続な地形での高速ナビゲーション
(出典:いずれもKAIST)
この階層構造による四足歩行ロボットナビゲーションフレームワークは既存の技術と比較して、計画速度、安定性の双方において優れた性能を示し、実験では、さまざまな障害物や不連続な地形を越えた高速移動能力と、目に見えない地形への一般的な適用性が証明された。
同教授は「本研究のアプローチにより、歩行ロボットが克服できる不連続地形の範囲が大幅に拡大し、高速移動が可能になり、災害現場の探索や山岳捜索といった実用的なミッションの遂行能力向上に貢献すると期待しています」と述べた。
サイエンスポータルアジアパシフィック編集部